RosettaCNC Board A - Manuale di installazione e manutenzione

Gentile Cliente,
Grazie per aver acquistato questo prodotto. RosettaCNC Board A è progettato e prodotto secondo standard elevati per conferire prestazioni di alta qualità, facilità di utilizzo e di installazione.
In caso di difficoltà durante l'installazione o l'utilizzo del prodotto, si consiglia di consultare in prima istanza le istruzioni o le informazioni riportate nel sito www.RosettaCNC.com.
Serve assistenza ?
Scrivete nel forum presente nel sito www.RosettaCNC.com oppure inviate una email al seguente indirizzo: support@rosettacnc.com, il team di sviluppo di RosettaCNC sarà lieto di rispondervi in tempi brevi.
I diritti d'autore di questo manuale sono riservati. Nessuna parte di questo documento, può essere copiata o riprodotta in qualsiasi forma senza la preventiva autorizzazione scritta. RosettaCNC Motion® non presenta assicurazioni o garanzie sui contenuti e specificatamente declina ogni responsabilità inerente alle garanzie di idoneità per qualsiasi scopo particolare. Le informazioni in questo documento sono soggette a modifica senza preavviso. RosettaCNC Motion® non si assume alcuna responsabilità per qualsiasi errore che può apparire in questo documento. RosettaCNC Motion® è un marchio registrato.
Informazioni
| |
||||
| Documento: | MIMROSETTACNCBOARDA | |||
|---|---|---|---|---|
| Descrizione: | Manuale di installazione e manutenzione | |||
| Link: | http://wiki.rosettacnc.com/doku.php/hardware:rosettacncboard:mimrosettacncboarda | |||
| Release documento | Release Hardware | Descrizione | Note | Data |
| 1 | 01 | - | / | 30/05/2017 |
| 2 | 01 | Corretta posizione degli Ingressi Utente e aggiunti Ingressi Utente numero 7 e 8 | / | 07/07/2017 |
| 3 | 01 | Nuova descrizione dell'ingresso PRB | / | 06/12/2017 |
| 4 | 01 | Completate alcune indicazioni per le uscire STEP DIR | / | 02/07/2018 |
| 5 | 01.2 | Correzioni alle caratteristiche elettriche di CN11 e CN3 e alcuni miglioramenti stilistici | / | 12/12/2018 |
| 6 | 01.2 | Aggiunte le nuove possibilità offerte dalla versione 1.5 del software RosettaCNC | / | 25/01/2019 |
| 7 | 01.2 | Nuovo codice ordinazione | / | 29/04/2019 |
| 8 | 01.2 | Aggiornato codice ordinazione | / | 16/07/2019 |
| 9 | 01.2 | Nuova descrizione CN11 per versione 1.6 del software RosettaCNC | / | 31/07/2019 |
| 10 | 02.0 | Descrizione nuovi CN4/CN10/CN14/SW3 opzionali | / | 02/09/2019 |
| 11 | 02.0 | Aggiunta versione commerciale con la funzione “Jerk control” | / | 05/06/2020 |
| 12 | 02.0 | Aggiunti nuovi ingressi utente e nuovi ingressi uscite virtuali. | / | 30/04/2021 |
| 13 | 04.0 | Aggiunte indicazioni per il nuovo hardware release 4.0 | / | 12/12/2022 |
| 14 | 05.0 | Aggiunte le opzioni 4 e 5 nel campo Espansione I/O | / | 26/07/2024 |
1. Introduzione
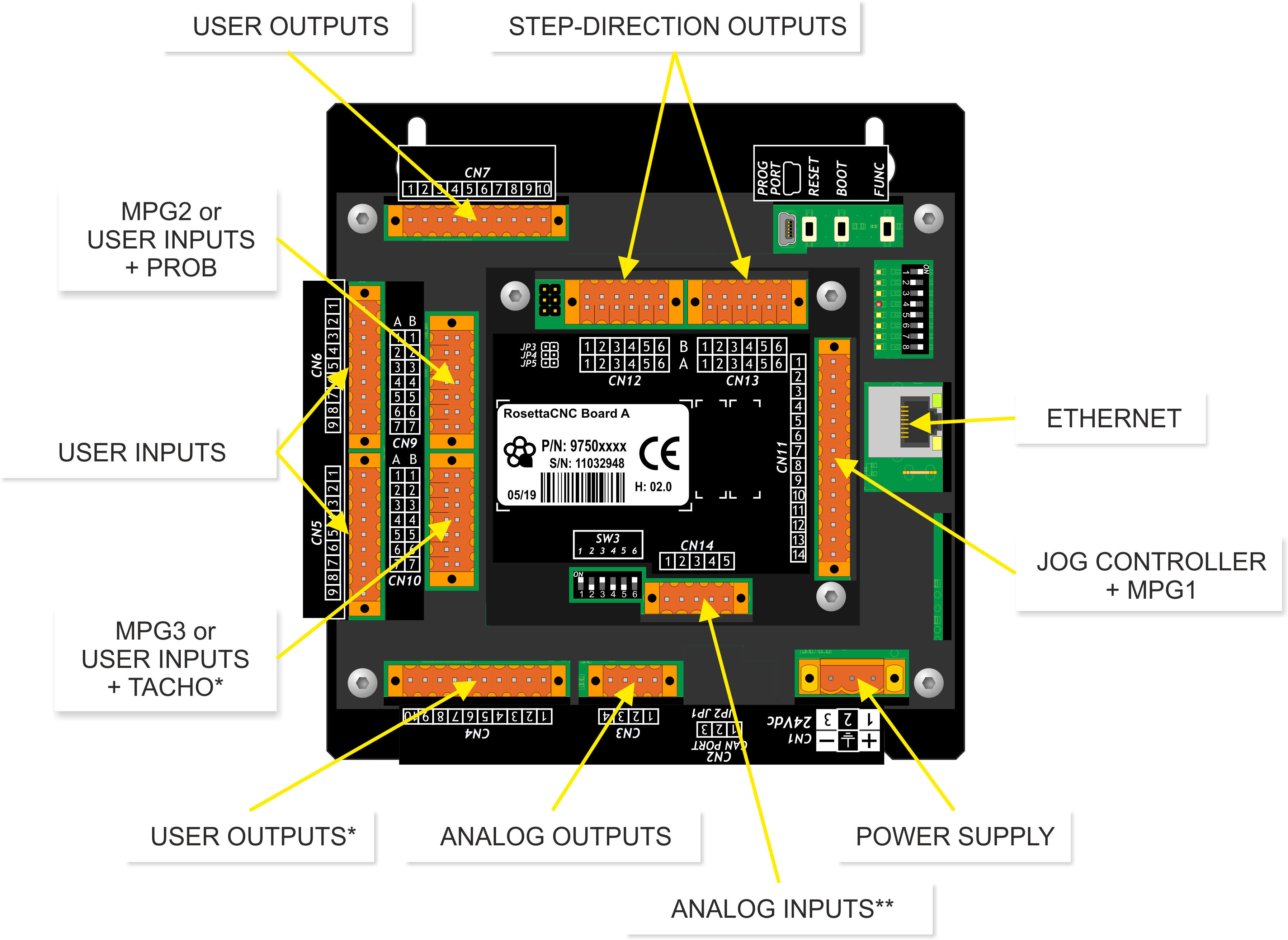
1.1 Descrizione generale
RosettaCNC Board A è un ETHERNET motion controller che gestisce fino a 4 assi interpolati. L'adozione della porta ETHERNET (anziché USB) garantisce una trasmissione veloce e sicura grazie al protocollo e all'isolamento galvanico nella connessione con il PC.
Non richiede l'utilizzo di parti elettroniche esterne o di protezioni. L'alimentatore è integrato e protetto, gli ingressi e le uscite sono dotate di opto-isolatori che garantiscono, assieme al contenitore metallico, una elevata resistenza ai disturbi elettromagnetici. Le uscite sono protette dai cortocircuiti e consentono di collegare direttamente carichi induttivi (relè o elettrovalvole), senza dover aggiungere componenti esterni.
Le uscite di comando di tipo STEP/DIR sono generate da una potente FPGA che permette di raggiungere frequenze di funzionamento fino a 2MHz (con duty cycle stabile al 50%) rendendo così possibile l'utilizzo sia di azionamenti passo-passo che di servo drive.
Rosetta CNC Board comanda gli assi utilizzando un profondo look ahead che permette di ottenere alte velocità di interpolazione.
Il prodotto può essere eventualmente dotato di un volantino, fornito già completo di connettore, oppure in alternativa rende disponibili degli ingressi per il collegamento dei Jog tipo
joystick e altri utili segnali di comando.
Rosetta CNC Board è dotata di connettori a molla estraibili per permettere un cablaggio rapido, altamente affidabile ed immune alle vibrazione.
1.2 Simboli utilizzati nel manuale
Informazioni utili e suggerimenti
Avvertimenti, il mancato rispetto di questi avvertimenti può portare ad un funzionamento inadeguato o danni al dispositivo
Potenziale pericolo e possibile rischio di infortunio
1.3 Composizione del sistema
RosettaCNC Motion® è un sistema composto dai seguenti elementi:
- RosettaCNC Board A che è il motion controller descritto in questo documento.
- RosettaCNC software, una completa applicazione Windows® per configurare, monitorare ed eseguire codici G.
- L'accessorio RosettaCNC Handwheel A, un pratico ed economico volantino.
- L'accessorio RosettaCNC MPG A, un dispositivo rotativo per poter modificare l'override.
Se si utilizza RosettaCNC Board A release hardware 4.0 o successiva è necessario utilizzare il software di controllo versione 1.11 o superiore.
1.4 Conformità del prodotto
Marcatura CE e riferimenti normativi
L'apparecchiatura è stata progettata per l'impiego in ambiente industriale in conformità alla direttiva 2004/108/CE.
EN 61000-6-4: Compatibilità elettromagnetica - Norma generica sull'emissione in ambiente industriale
- EN55011 Class A: Limiti e metodi di misura
EN 61000-6-2: Compatibilità elettromagnetica - Norma generica sull'immunità negli ambienti industriali
- EN 61000-4-3: Immunità ai campi magnetici a radiofrequenza
- EN 61000-4-4: Transitori veloci
- EN 61000-4-5: Transitori impulsivi
- EN 61000-4-6: Disturbi condotti a radiofrequenza
Il prodotto risulta inoltre conforme alle seguenti normative:
- EN 60068-2-1: Test di resistenza al freddo
- EN 60068-2-2: Test di resistenza al caldo secco
1.5 Contenuto della confezione
- n.1 RosettaCNC Board
- n.1 Confezione di morsetti a molla

1.6 Identificazione del prodotto
In base al Codice d'ordinazione del prodotto è possibile ricavarne esattamente le caratteristiche.
Verificare che le caratteristiche del prodotto corrispondano alle Vostre esigenze.
1.6.1 Etichetta prodotto
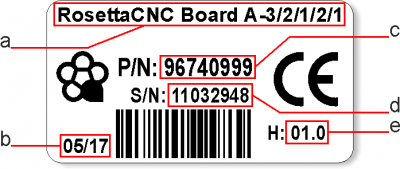
- a - Codice di ordinazione
- b - Data di produzione: indica la settimana e l'anno di produzione
- c - Part number: codice univoco che identifica un codice d'ordinazione
- d - Serial number: numero di serie dello strumento, unico per ogni pezzo prodotto
- e - Versione hardware: versione e release dell'hardware
1.6.2 Codice di ordinazione
| Modello | - | Caratteristiche | |||||||||||||
| RosettaCNC A | - | 3 | / | 0 | / | 0 | / | 1 | / | 1 | / | 1 | - | 001 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Codice personalizzazione. (omesso se non presente alcuna personalizzazione) | |||||||||||||||
| Funzioni “Gruppo B”. 0 = Nessuna funzione abilitata; 1 = Acquisizione Laser; 2 = THC interno | |||||||||||||||
| Funzioni “Gruppo A”. 0 = Nessuna funzione abilitata; 1 = RTCP,2 = Jerk control, 3 = RTCP + Jerk control; | |||||||||||||||
| Comunicazione remota. 0 = Nessuna comunicazione; 1 = OPC; 2 = OPC + RosettaCNC Data Exchange 4.0; | |||||||||||||||
| Espansione I/O. 0 = Non presente; 1 = Espansione base; 2 = Espansione Ingressi Analogici; 3 = Espansione completa; 4 = Espansione completa + seriale RS485; 5 = Espansione completa + seriale RS485 e CANbus | |||||||||||||||
| Massima Frequenza Uscite Step. 0 = 125 KHz; 1 = 200Khz; 2 = 300Khz; 3 = 500Khz; 4 = 1Mhz; 5 = 2Mhz; | |||||||||||||||
| Numero di Assi. 3 = 3 assi; 4 = 4 assi; | |||||||||||||||
| Modello Controller. RosettaCNC A = Controller Board A | |||||||||||||||
1.6.3 Codici normalmente disponibili
| Part number | Modello | Caratteristiche |
|---|---|---|
| 97500012 | RosettaCNC A - 4/1/0/0/0/0 | 4 assi, max step freq 200 KHz |
| 97500007 | RosettaCNC A - 4/2/0/0/0/0 | 4 assi, max step freq 300 KHz |
| 97500009 | RosettaCNC A - 4/2/0/1/0/0 | 4 assi, max step freq 300 KHz, OPC-UA server |
| 97500010 | RosettaCNC A - 4/3/0/0/0/0 | 4 assi, max step freq 500 KHz |
| 97500011 | RosettaCNC A - 4/4/3/1/1/1 | 4 assi, max step freq 1 MHz, OPC-UA server, espansione I/O, RTCP, Acquisizione Laser |
A partire da maggio 2019 il Part Number 97500003 “Versione 4 assi” è sostituito dal nuovo codice 97500007.
1.7 Caratteristiche
| Descrizione | Valore |
|---|---|
| Alimentazione | 24VDC |
| Assorbimento massimo | 10W |
| Numero assi | 3 o 4 1) |
| Ingressi digitali | 19 o 21 2) (18 sempre disponibili, 1 dipendente da parametro “Tipo controller”, restanti 2 su Espansione I/O) |
| Interfacciamento volantino | selettore per 4 assi selettore x1-x10-x100 fungo emergenza |
| Ingressi tastatore | 1 |
| Ingressi tachimetrica | 1 3) |
| Ingressi digitali EXTRA | 10 4) |
| Ingressi analogici | 3 5) |
| Uscite digitali | 8 o 16 6) |
| Uscite analogiche | 1 |
| Tipo di controllo assi | STEP/DIR |
| Comunicazione PC | Ethernet 10/100Mb |
| Range di temperatura | 0°C to +50°C |
| Ingressi MPG | 2 o 3 7) ( MPG1 condiviso con volantino ) |
| Grado di protezione dell'involucro | IP20 (come da normativa EN-60529) |
2. Sicurezza
RosettaCNC Board è alimentato in bassa tensione, a 24VDC, le linee di I/O sono opto-isolate ed anche la connessione al PC è galvanicamente isolata perciò il dispositivo non costituisce una minaccia diretta per la salute e la vita dell'utente.
La progettazione di un sistema di controllo completo (quadro elettrico), dovrebbe richiamare l'attenzione su diversi aspetti, in modo che l'intero sistema macchina non diventi un pericolo durante l'uso.
E' buona norma utilizzare sempre i contatti NC per i finecorsa e per il fungo di emergenza in modo che un errore di cablaggio o una disconnessione del filo portino sempre l'arresto della macchina.
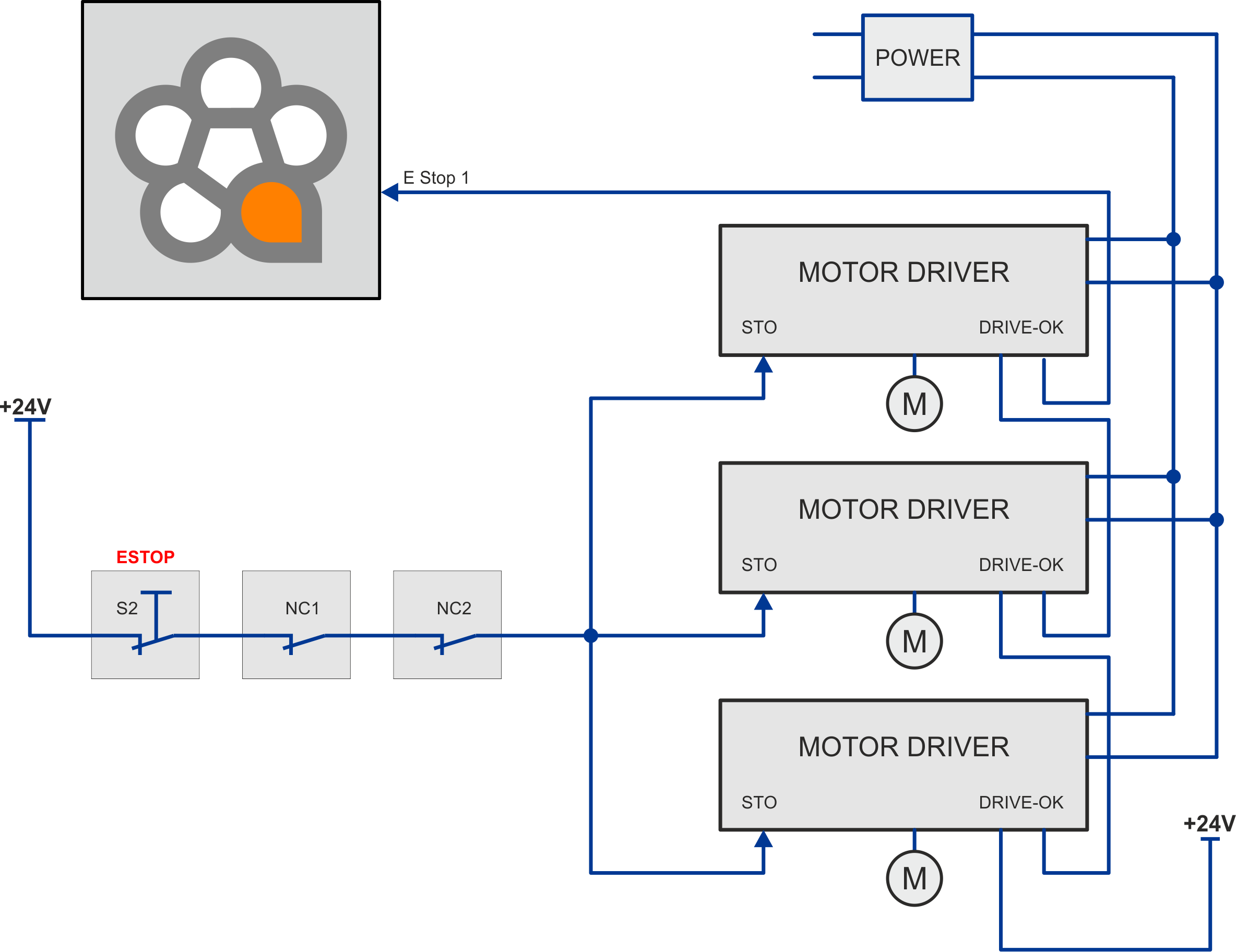
E' necessario prestare particolare attenzione al circuito di arresto per emergenza: il sistema di comando deve essere progettato in modo tale che quando si preme il fungo per arresto di emergenza, la macchina interrompa immediatamente il movimento di tutti gli assi. Si dovrebbe anche prendere in considerazione la possibilità di guasto di particolari componenti del sistema, come il controller principale, o le unità di comando degli assi.
La sicurezza della macchina non è mai responsabilità del controllore RosettaCNC Board
Di seguito riportiamo due esempi di collegamento. Il primo utilizza l'ingresso Safe Torque Off (STO) presente negli azionamenti.
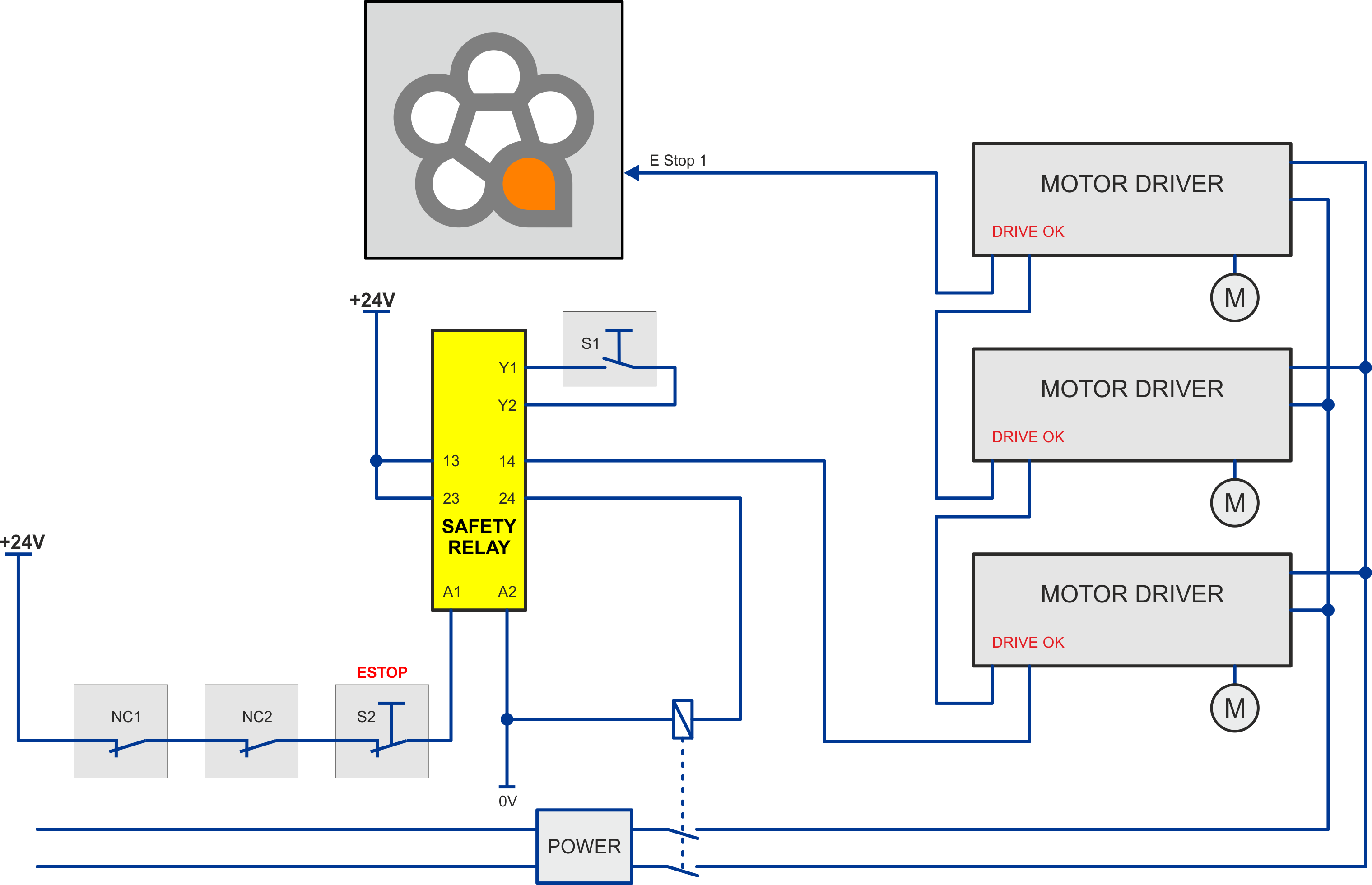
Il secondo utilizza un dispositivo di sicurezza per controllare la catena dei segnali legati all'emergenza.
Ambedue sono solo schemi di principio e ogni installatore deve poi progettare il proprio schema adatto per la macchina in accordo con le normative che essa deve rispettare.
Nella figura sottostante viene usato un dispositivo di sicurezza Pilz modello PNOZ X7. Il fungo interruttore di sicurezza, ed eventualmente altri segnali di allarme (barriere di sicurezza, apertura carter, ecc.) dovranno essere collegati ai circuiti di ingresso. Una uscita dovrà essere collegata all'ingresso EST1 di RosettaCNC Board ed in serie anche le uscite di drive ok degli azionamenti. L'altra uscita del modulo di sicurezza dovrà essere usata per interrompere l'alimentazione agli azionamenti.
S1 è il pulsante di ripristino.
S2 è il pulsante di arresto in emergenza.
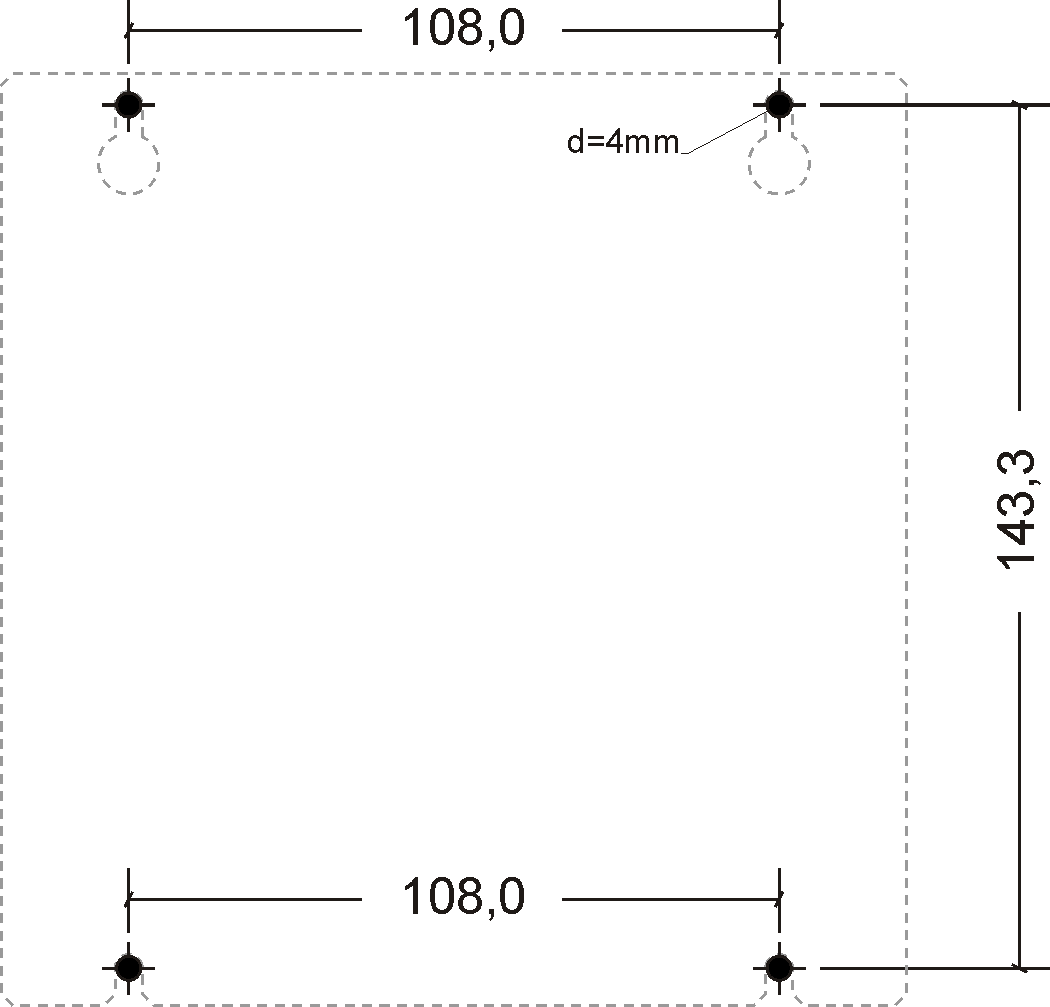
3. Installazione meccanica
3.1 Dimensioni meccaniche
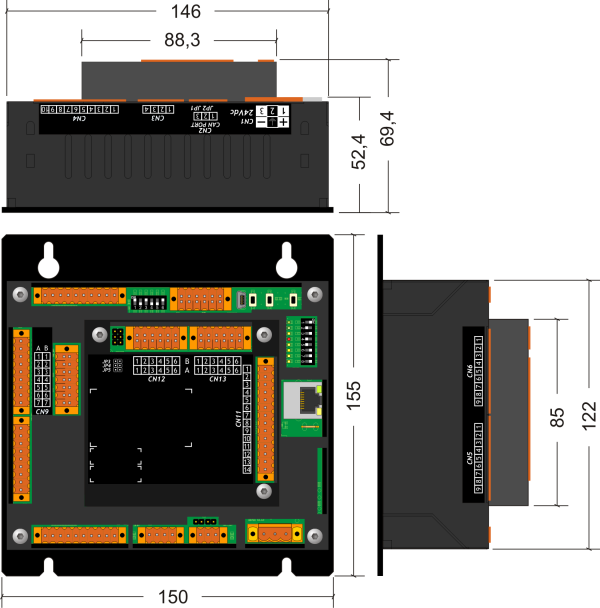
Quote in mm
3.2 Dima di foratura
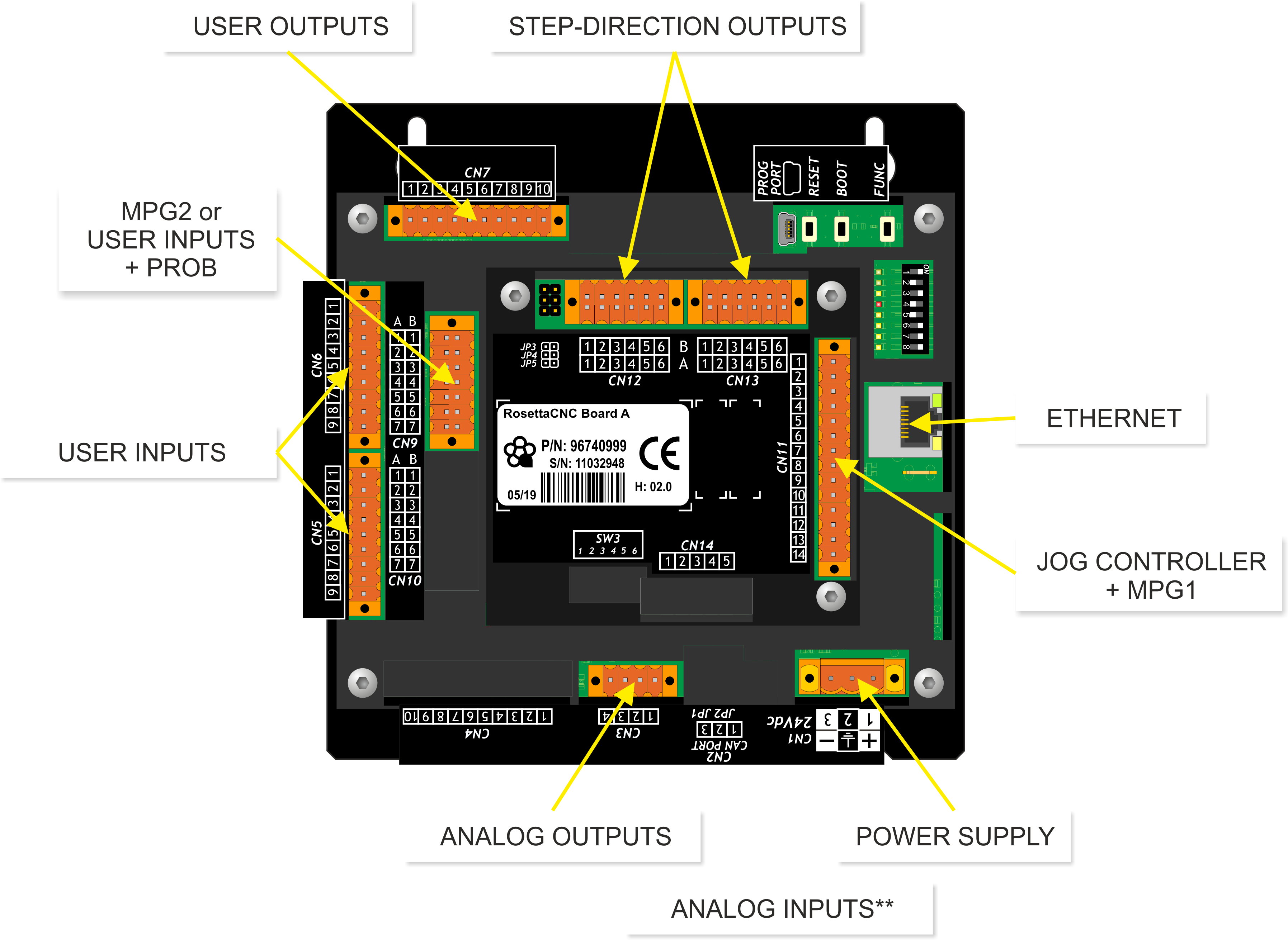
4. Connettori
Per informazioni riguardanti le sezioni dei cavi utilizzabili ed i connettori usati, consultare l'application note AN001
In base alla versione “Espansione I/O” saranno presenti o meno alcuni connettori.
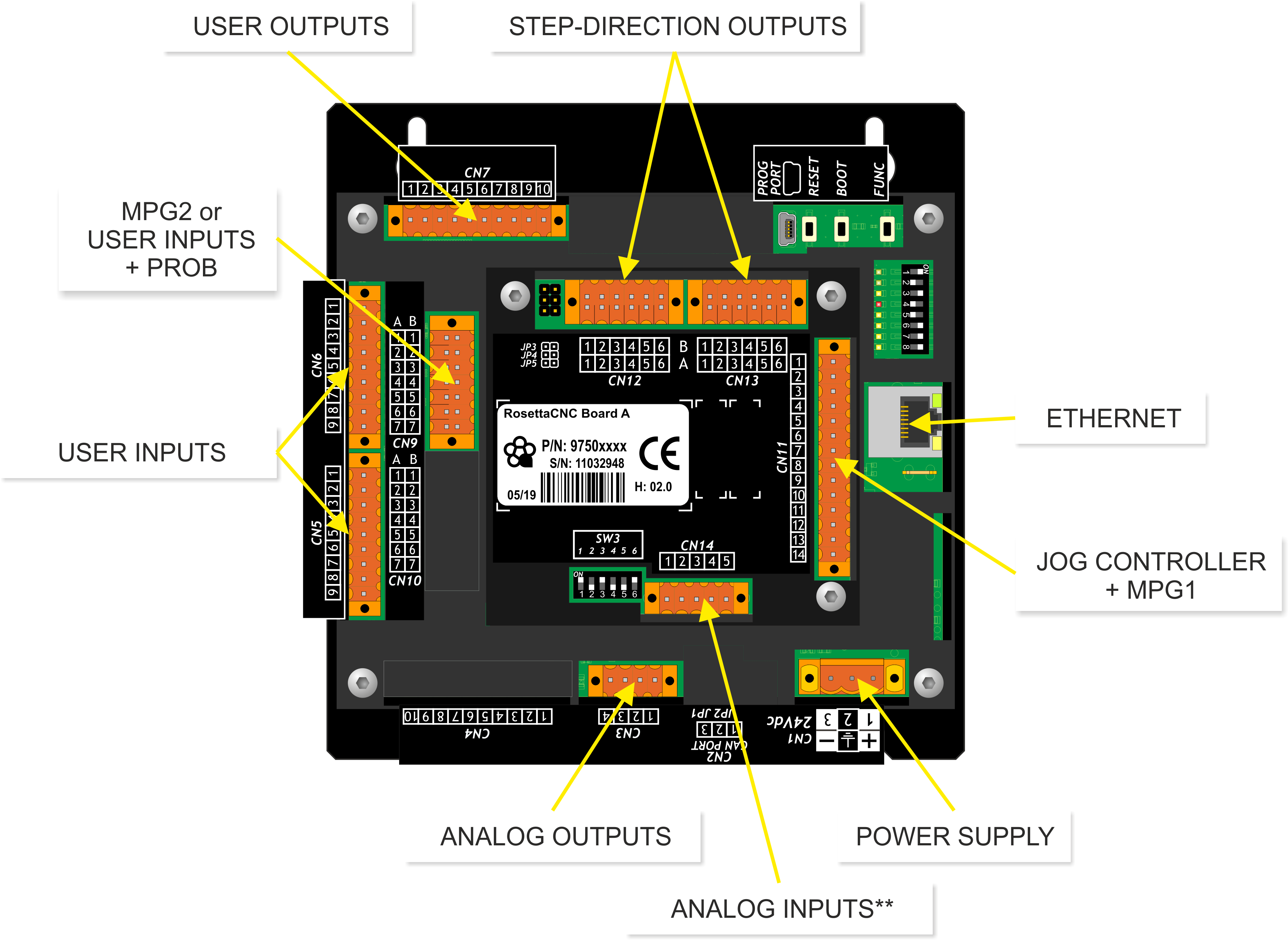
4.1 Espansione I/O = 0
4.2 Espansione I/O = 1
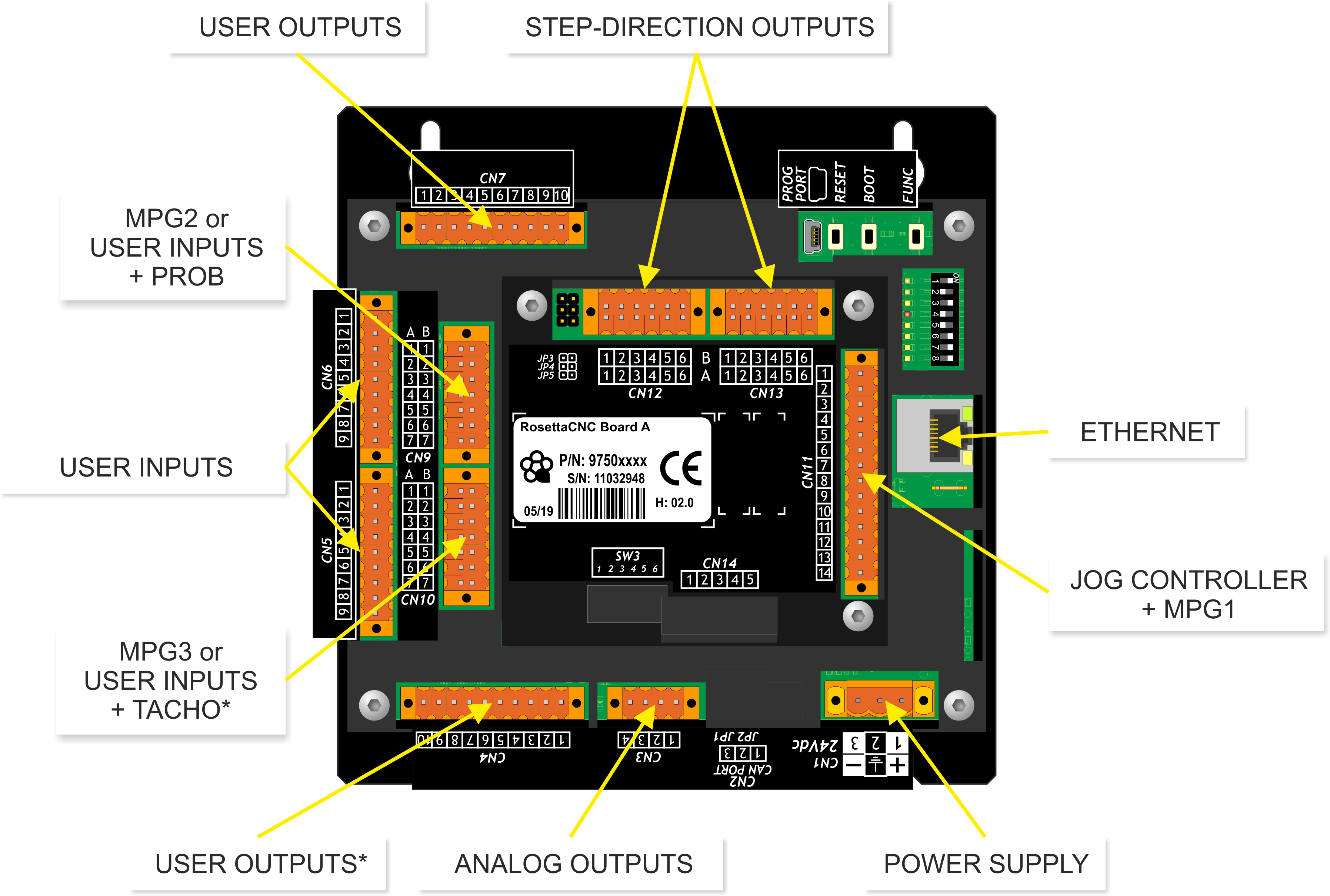
4.3 Espansione I/O = 2
4.4 Espansione I/O = 3
4.5 Espansione I/O = 4

4.6 Espansione I/O = 5

4.7 Power supply
Il cablaggio deve essere eseguito da personale specializzato e dotato degli opportuni provvedimenti antistatici.
Prima di maneggiare lo strumento, togliere tensione e tutte le parti ad esso collegate.
Per garantire il rispetto delle normative CE, la tensione d'alimentazione deve avere un isolamento galvanico di almeno 1500 Vac.
| Alimentazioni disponibili | 24 Vdc |
|---|---|
| Range valido | 22 ÷ 27 Vdc |
| Assorbimento max. | 10W |
Connettore
| CN1 | Morsetto | Simbolo | Descrizione | |
|---|---|---|---|---|
 |  | 1 | | Positivo alimentazione |
| 2 | TERRA | Terra-PE (segnali) | ||
| 3 | | 0V alimentazione | ||
Esempi di collegamento
Si prescrive l'uso di un alimentatore isolato con uscita 24Vdc conforme a EN60950-1.
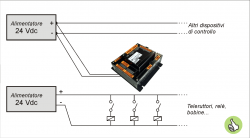 | Usare due alimentatori separati: uno per la parte di controllo e uno per la parte di potenza |
 | Non usare le stesse linee della parte di potenza |
4.8 Collegamenti seriali
4.8.1 ETHERNET port
| ETHERNET PORT | Descrizione |
|---|---|
 | Connettore RJ45. LED: * LINK: led verde = cavo collegato (il led acceso indica che il cavo è connesso ad entrambi i capi) * DATA: led giallo = scambio dati (il led lampeggiante indica lo scambio dati tra i dispositivi collegati) |
4.8.2 USER PORT
Connettore
| CN8 | Morsetto | RS232 | RS422 | RS485 | Descrizione |
|---|---|---|---|---|---|
  | 1A | - | - | A | Terminale A - RS485 |
| 2A | - | - | B | Terminale B - RS485 | |
| 3A | 0V | 0V | 0V | Comune USER PORT | |
| 4A | 0V | 0V | 0V | Comune USER PORT | |
| 5A | TX | - | - | Terminale TX - RS232 | |
| 6A | Terra | ||||
| 1B | - | RX | - | Terminale RX - RS422 | |
| 2B | - | RXN | - | Terminale RX N - RS422 | |
| 3B | - | TX | - | Terminale TX - RS422 | |
| 4B | - | TXN | - | Terminale TX N - RS422 | |
| 5B | RX | - | - | Terminale RX - RS232 | |
| 6B | Terra | ||||
Settaggio standard elettrico

4.8.3 CANbus PORT
Connettore
| CN2 | Morsetto | Simbolo | Descrizione |
|---|---|---|---|
 | 1 | CAN H | Terminale CAN H |
| 2 | CAN L | Terminale CAN L | |
| 3 | 0V | Comune CAN |
Settaggio resistenze di terminazione
| Nome jumper | Impostazione | Funzione | |
|---|---|---|---|
JP1 JP2 | JP1 | INSERITO | Terminazione CAN attivata |
| JP2 |
4.9 Ingressi digitali
Gli ingressi digitali chiamati “Ingresso utente” possono essere configurati dal software RosettaCNC per svolgere alcune funzioni. Per esempio; ESTOP 1, Velocità ok mandrino, Velocità zero mandrino, Limite, Start, Barriere di sicurezza, ecc
4.9.1 CN6
| CN6 | Morsetto | Ingressi utente | Ingressi homing | ||
|---|---|---|---|---|---|
| Simbolo | Descrizione | Simbolo | Descrizione | ||
 | 1 | 0V | Comune degli ingressi digitali | ||
| 2 | I9 | Ingresso utente I9 | |||
| 3 | I10 | Ingresso utente I10 | |||
| 4 | I11 | Ingresso utente I11 | |||
| 5 | I12 | Ingresso utente I12 | |||
| 6 | I13 | Ingresso utente I13 | HMX | Homing X | |
| 7 | I14 | Ingresso utente I14 | HMY | Homing Y | |
| 8 | I15 | Ingresso utente I15 | HMZ | Homing Z | |
| 9 | I16 | Ingresso utente I16 | HMA | Homing A | |
Se si utilizza la versione 1.4 o precedente del software RosettaCNC, il connettore CN6 ha una funzione fissa. In particolare pin2=PAUSA, pin3=LIMITE, pin4=ESTOP1, pin5=N.C, pin6÷9=Homing.
4.9.2 CN5
| CN5 | Morsetto | Ingressi utente | |
|---|---|---|---|
| Simbolo | Descrizione | ||
| | 1 | 0V | Comune degli ingressi digitali |
| 2 | I1 | Ingresso utente I1 | |
| 3 | I2 | Ingresso utente I2 | |
| 4 | I3 | Ingresso utente I3 | |
| 5 | I4 | Ingresso utente I4 | |
| 6 | I5 | Ingresso utente I5 | |
| 7 | I6 | Ingresso utente I6 | |
| 8 | I7 | Ingresso utente I7 | |
| 9 | I8 | Ingresso utente I8 | |
4.9.3 Caratteristiche elettriche
| Type | PNP |
| Minimum acquisition time (hardware) | 3ms |
| Rated operating voltage | 12÷24Vdc |
| Maximum voltage | 26.5Vdc |
| Voltage state logic 0 | < 2 V |
| Voltage state logic 1 | > 10.5 V |
| Absorbed current | 2mA@10.5V / 8mA@26.5V |

4.9.4 Esempi di collegamento su CN6
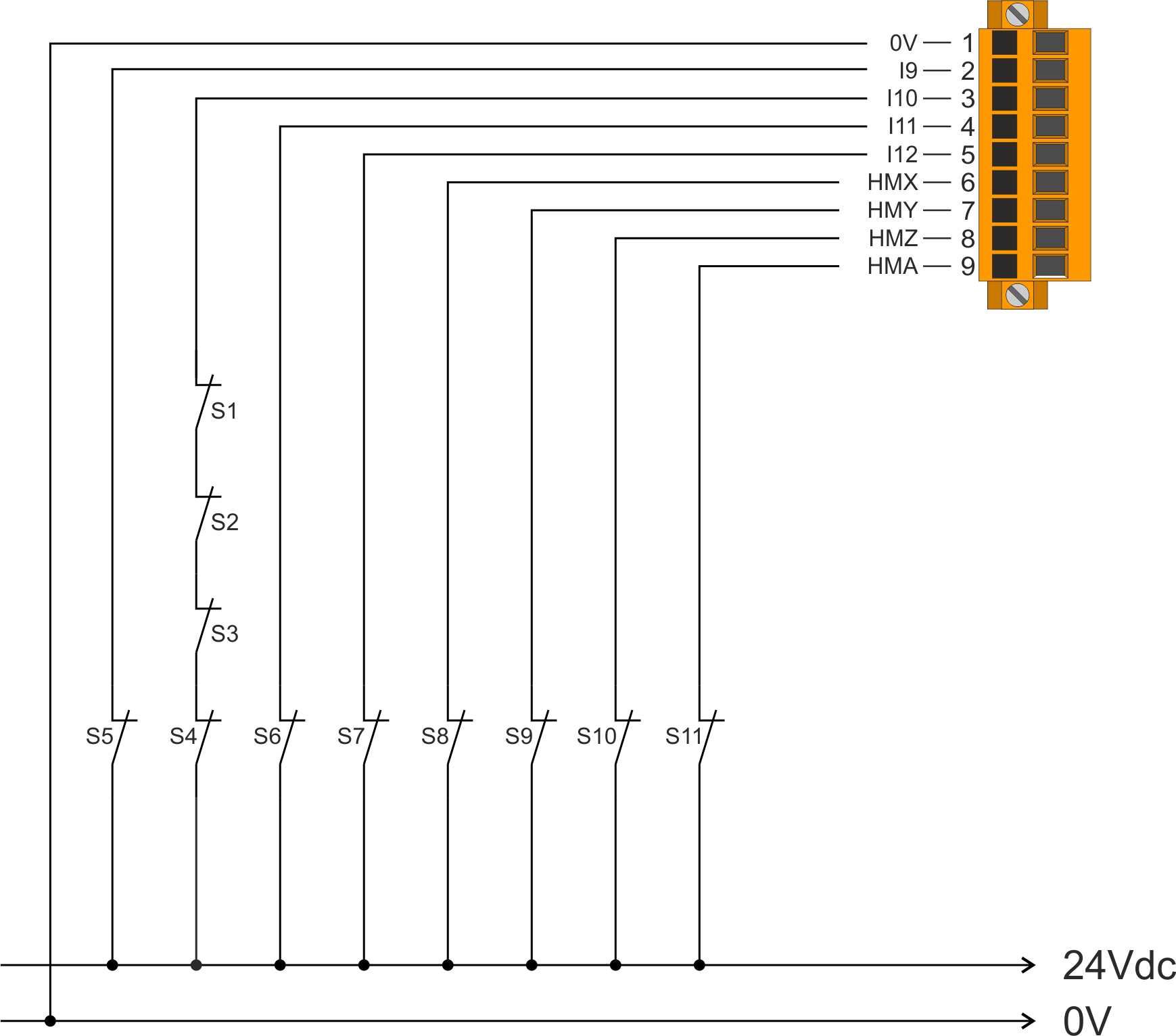
| S1 | X axis limit switch |
| S2 | Y axis limit switch |
| S3 | Z axis limit switch |
| S4 | A axis limit switch |
| S5 | Switch for pause |
| S6 | E stop |
| S7 | Start input button |
| S8 | Home X switch |
| S9 | Home Y switch |
| S10 | Home Z switch |
| S11 | Home A switch |
4.9.5 Volantino o Consolle
I connettori seguenti sono utilizzati per funzionalità diverse e dipendenti dal valore del parametro “Tipo di controller”. Questo parametro è presente nel pannello “Impostazioni scheda RosettaCNC” → Jog.
| CN11 | Morsetto | Simbolo | Ingresso utente | Parametro “Tipo di controller Jog” | ||
|---|---|---|---|---|---|---|
| Handwheel | Joystick singolo | Joystick multipli | ||||
 | 1 | 0V | Comune degli ingressi digitali | |||
| 2 | HSX / CSX / JXP | I23 | Volantino: selezione asse X | Controllore: selezione asse X | Jog X+ | |
| 3 | HSY / CSY / JXM | I24 | Volantino: selezione asse Y | Controllore: selezione asse Y | Jog X- | |
| 4 | HSZ / CSZ / JYP | I25 | Volantino: selezione asse Z | Controllore: selezione asse Z | Jog Y+ | |
| 5 | HSA / CSA / JYM | I26 | Volantino: selezione asse A | Controllore: selezione asse A | Jog Y- | |
| 6 | HMO / ZERO / JZP | I27 | Volantino: moltiplicatore x1 | Azzera | Jog Z+ | |
| 7 | HMT / JP / JZM | I28 | Volantino: moltiplicatore x10 | Jog + | Jog Z- | |
| 8 | HMH / JN / JAP | I29 | Volantino: moltiplicatore x100 | Jog - | Jog A+ | |
| 9 | I19 / I19 / JAM | I19 | Jog A- | |||
| 10 | +5V | 5 Volts DC output - Corrente massima erogabile 50mA | ||||
| 11 | HPA / CPA / CPA | I30 | Controllore volantino PHA - [ MPG1 ] | Controllore PHA - [ MPG1 ] | Controllore PHA - [ MPG1 ] | |
| 12 | HPB / CPB / CPB | I31 | Controllore volantino PHB - [ MPG1 ] | Controllore PHB - [ MPG1 ] | Controllore PHB - [ MPG1 ] | |
| 13 | Morsetti 13 e 14 internamente collegati tra di loro | |||||
| 14 | ||||||
Se si utilizza la versione 1.4 o precedente del software RosettaCNC, questo connettore non può essere utilizzato come MPG1 ed il pin9 ha la funzione fissa di ESTOP2.
4.9.5.1 Caratteristiche elettriche
Fasi encoder morsetto 11 e 12
| Tipo | PNP |
| Tempo min. di acquisizione (hardware) | 1 ms |
| Tensione di funzionamento nominale | 5 Vdc |
| Tensione massima | 7 Vdc |
| Tensione stato logico 0 | < 1.6 V |
| Tensione stato logico 1 | > 2.7 V |
| Corrente assorbita | 17 mA @ 5 V |
Ingressi dei morsetti 2÷9
| Tipo | PNP |
| Tempo min. di acquisizione (hardware) | 1 ms |
| Tensione di funzionamento nominale | 5/12/24 Vdc |
| Tensione massima | 26 Vdc |
| Tensione stato logico 0 | < 1 V |
| Tensione stato logico 1 | > 3.5 V |
| Corrente assorbita | 0.1mA@5V / 6mA@12V / 16mA@24V |
4.9.5.2 Esempi di collegamento
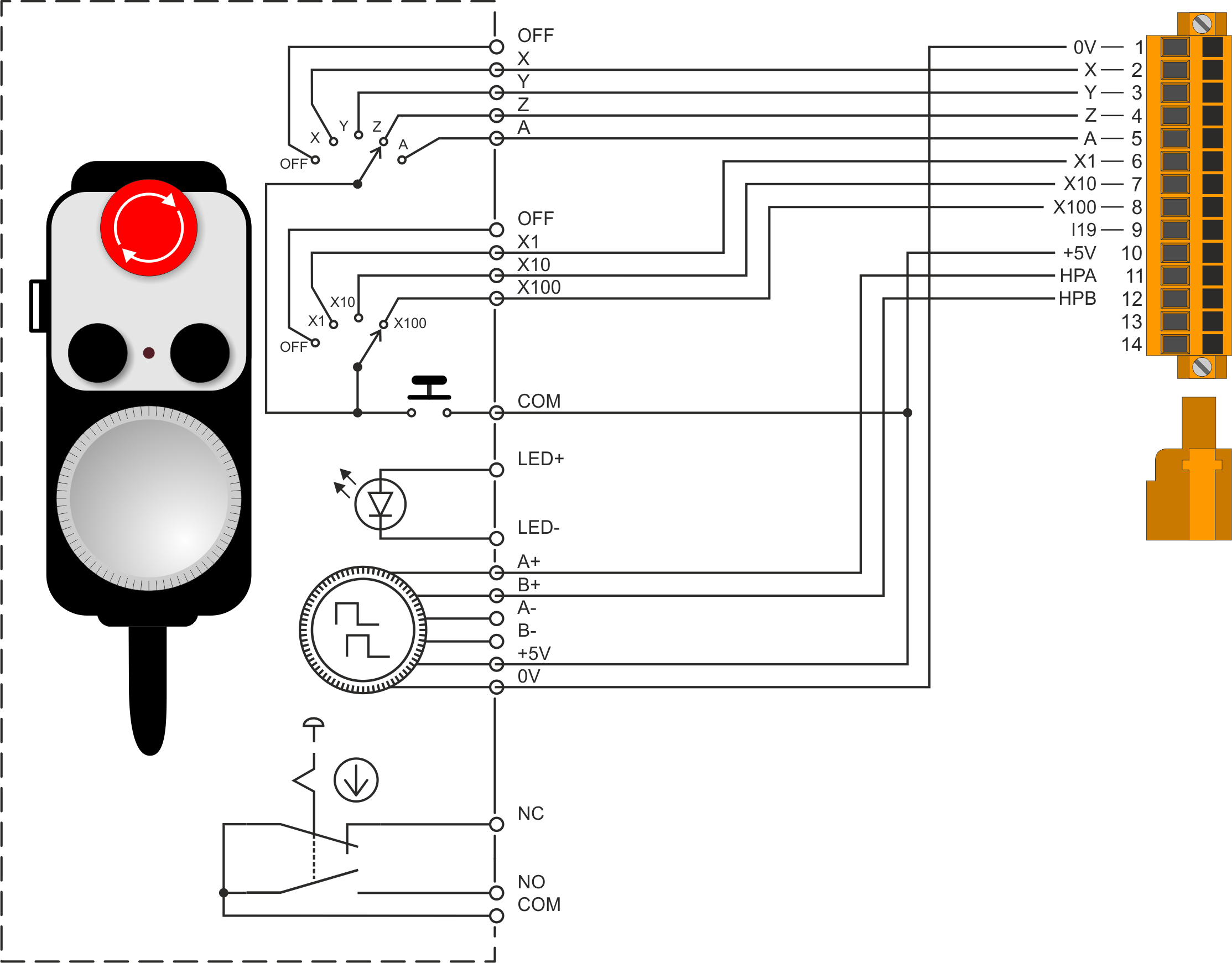
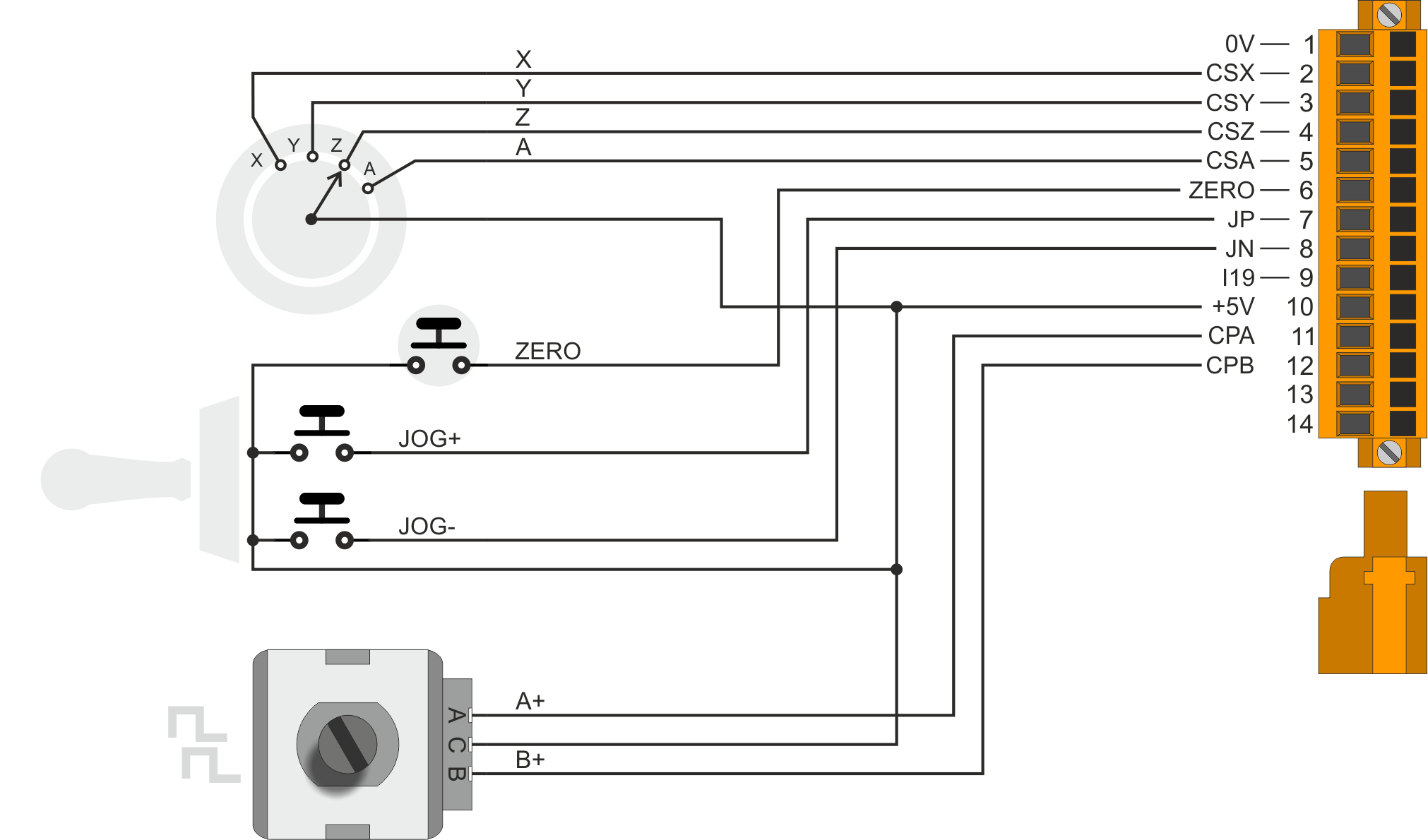
Esempi di collegamento per “HandWheel A” su CN11
Esempi di collegamento per “Joystick singolo” ed MPG1 su CN11
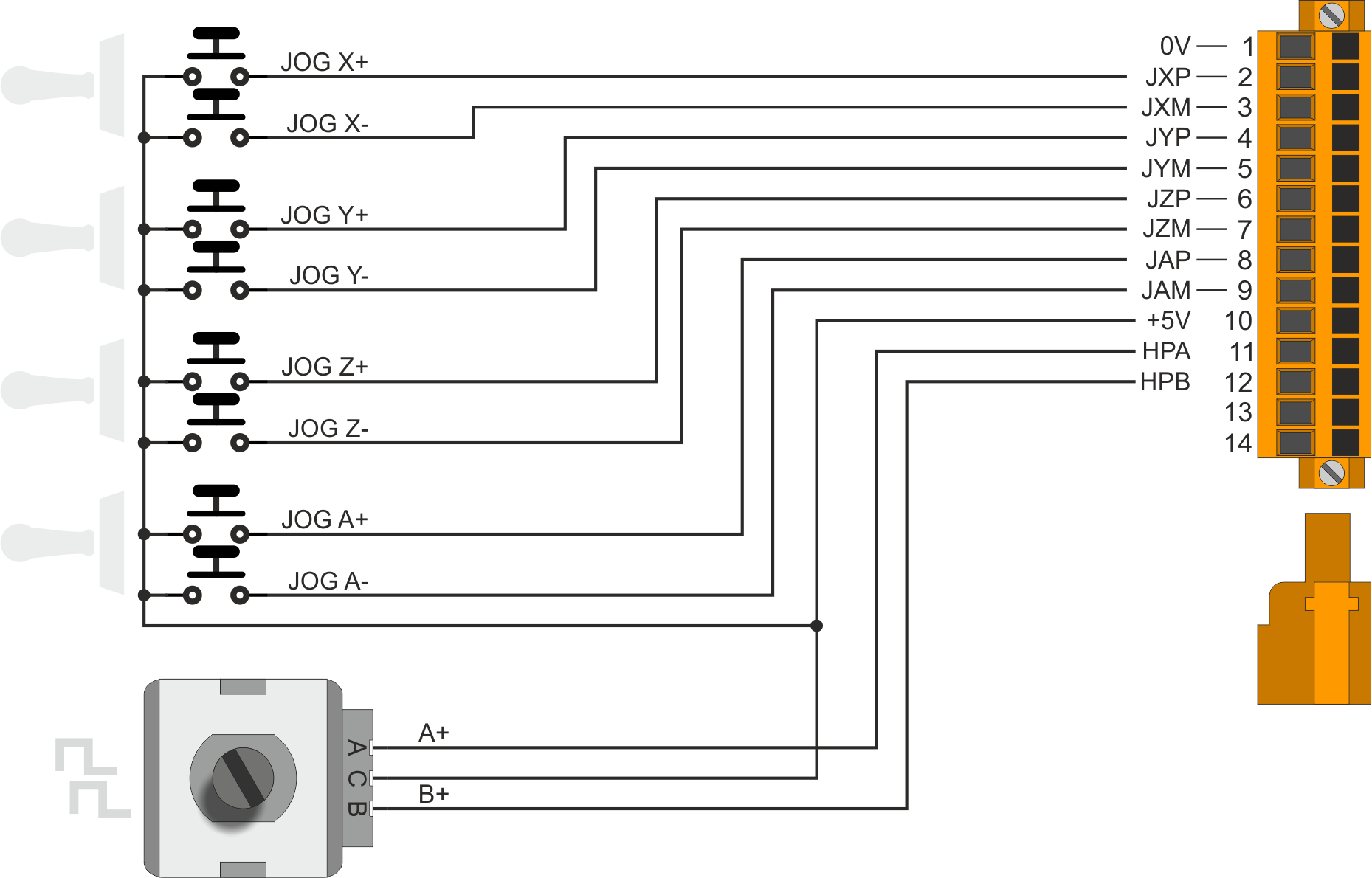
Esempi di collegamento per “Joystick multipli” ed MPG1 su CN11
4.9.6 CN9
Può essere usato come MPG2 e come “Ingressi utente”. Inoltre è consentito il collegamento del PROBE.
| CN9 | Morsetto | Ingressi utente | MPG2 | PROBE | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Simbolo | Descrizione | Simbolo | Descrizione | Simbolo | Descrizione | |||||
 | 1A | 24Vdc | Uscita +24Vdc | 24Vdc | Uscita +24Vdc | 24Vdc | Uscita +24Vdc | |||
| 2A | I17 | Ingresso utente I17 | PHA | Fase A | ||||||
| 3A | I18 | Ingresso utente I18 | PHB | Fase B | ||||||
| 4A | I32 | Ingresso utente I32 | PROBE | Sensore PROBE | ||||||
| 5A | Collegare con 5B | Collegare con 5B | ||||||||
| 6A | Collegare con 6B | Collegare con 6B | ||||||||
| 7A | Collegare con 7B | |||||||||
| 1B | ||||||||||
| 2B | ||||||||||
| 3B | ||||||||||
| 4B | ||||||||||
| 5B | Collegare con 5A | Collegare con 5A | ||||||||
| 6B | Collegare con 6A | Collegare con 6A | ||||||||
| 7B | Collegare con 7A | |||||||||
Se si utilizza la versione 1.4 o precedente del software RosettaCNC, il connettore CN9 può essere utilizzato solo per ingresso PROBE e funzione MPG per il feed l'override.
4.9.7 Caratteristiche elettriche
| Tipo di polarizzazione | PNP(12-24V) | PNP(5V) |
| Morsetti interessati | 2A, 3A, 4A | 2B, 3B, 4B |
| Frequenza massima | 200KHz | |
| Tempo min. di acquisizione | 5µs | |
| Isolamento | 1000Vrms | |
| Tensione di funzionamento nominale | 24Vdc | 5Vdc |
| Tensione stato logico 0 | 0 ÷ 2 V | 0÷1,5 V |
| Tensione stato logico 1 | 10,5 ÷ 26,5 V | 2÷5 V |
| Caduta di tensione interna | 1,2V | |
| Resistenza di ingresso | 3100Ω | 150Ω |
4.9.7.1 Esempi di collegamento
Ingressi utente a 12-24Vdc su CN9

MPG2 su CN9

PROBE su CN9

4.9.8 CN10
Può essere usato come MPG3 o come “Ingressi utente”. Inoltre è consentito anche il collegamento del TACHO (segnale digitale per tachimetrica mandrino).
| CN10 | Morsetto | Ingressi utente | MPG3 | TACHO | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Simbolo | Descrizione | Simbolo | Descrizione | Simbolo | Descrizione | |||||
| | 1A | 24Vdc | Uscita +24Vdc | 24Vdc | Uscita +24Vdc | 24Vdc | Uscita +24Vdc | |||
| 2A | I20 | Ingresso utente I20 | PHA | Fase A | ||||||
| 3A | I21 | Ingresso utente I21 | PHB | Fase B | ||||||
| 4A | I22 | Ingresso utente I22 | TACHO | Sensore TACHO | ||||||
| 5A | Collegare con 5B | Collegare con 5B | ||||||||
| 6A | Collegare con 6B | Collegare con 6B | ||||||||
| 7A | Collegare con 7B | |||||||||
| 1B | ||||||||||
| 2B | ||||||||||
| 3B | ||||||||||
| 4B | ||||||||||
| 5B | Collegare con 5A | Collegare con 5A | ||||||||
| 6B | Collegare con 6A | Collegare con 6A | ||||||||
| 7B | Collegare con 7A | |||||||||
Connettore CN10 disponibile solamente con Codice di ordinazione campo Espansione I/O = 1 o 3.
4.9.9 Caratteristiche elettriche
| Tipo di polarizzazione | PNP(12-24V) | PNP(5V) |
| Morsetti interessati | 2A, 3A, 4A | 2B, 3B, 4B |
| Frequenza massima | 200KHz | |
| Tempo min. di acquisizione | 5µs | |
| Isolamento | 1000Vrms | |
| Tensione di funzionamento nominale | 24Vdc | 5Vdc |
| Tensione stato logico 0 | 0 ÷ 2 V | 0÷1,5 V |
| Tensione stato logico 1 | 10,5 ÷ 26,5 V | 2÷5 V |
| Caduta di tensione interna | 1,2V | |
| Resistenza di ingresso | 3100Ω | 150Ω |
4.9.9.1 Esempi di collegamento
Ingressi utente a 12-24Vdc su CN10

MPG3 su CN10

Ingresso TACHO 12-24Vdc su CN10

4.10 Ingressi analogici
Ogni singolo ingresso analogico può essere configurato tramite il software RosettaCNC per gestire un override. Le impostazioni sono presenti nel pannello “Impostazioni scheda RosettaCNC” → “Overrides”.
Possono essere controllate le seguenti grandezze:
- Velocità Jog
- Velocita Fast (G0)
- Velocità Feed (G1,G2,ecc)
- Velocità Mandrino
Inoltre solo l'ingresso analogico AN1 può essere utilizzato per collegare un digitalizzatore tipo Laser. Le impostazioni sono presenti nel pannello “Impostazioni scheda RosettaCNC” → “Digitalizzatore”.
4.10.1 CN14
| CN14 | Morsetto | Simbolo | Descrizione |
|---|---|---|---|
 | 1 | VREF | Tensione di riferimento 1) |
| 2 | AI1 | Ingresso analogico 1 | |
| 3 | AI2 | Ingresso analogico 2 | |
| 4 | AI3 | Ingresso analogico 3 | |
| 5 | GAI | Comune ingressi analogici |
Connettore CN14 e dip-switch SW3 disponibili solamente con Codice di ordinazione campo Espansione I/O = 2 o 3.
4.10.2 Settaggio degli ingressi analogici
| SW3 | Num. Dip | Ingresso analogico 1 | Ingresso analogico 2 | Ingresso analogico 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Pot. | 0-10V | 0-20mA | Pot. | 0-10V | 0-20mA | Pot. | 0-10V | 0-20mA | ||
 | 1 | OFF | OFF | ON | X | X | X | X | X | X |
| 2 | OFF | ON | OFF | X | X | X | X | X | X | |
| 3 | X | X | X | OFF | OFF | ON | X | X | X | |
| 4 | X | X | X | OFF | ON | OFF | X | X | X | |
| 5 | X | X | X | X | X | X | OFF | OFF | ON | |
| 6 | X | X | X | X | X | X | OFF | ON | OFF | |
X = settaggio ininfluente
Pot. = ingresso di tipo potenziometrico
0-10V = ingresso di tipo voltmetrico
0-20mA = ingresso di tipo amperometrico
4.10.3 Caratteristiche elettriche
4.10.3.1 Ingresso analogico in configurazione amperometrica 0-20mA
| Tipo di collegamento | Amperometrico (0-20 mA) |
| Risoluzione | 12bit |
| Resistenza d'ingresso | 125Ω |
| Valore di danneggiamento | 25 mA |
| Max. errore di linearità | + 0,1% Vfs |
| Max. errore di offset | + 0,1% Vfs |
| S.n. | 71 dB |
| Tempo di conversione | Dipende dalla configurazione dell'ingresso analogico. Vedi paragrafo Tempi di conversione se presente 1) |
| Isolamento | 1000 Vrms |

4.10.3.2 Ingresso analogico in configurazione potenziometrica
| Tipo di collegamento | Potenziometrico 1KΩ÷20KΩ |
| Risoluzione | 12bit |
| Tensione di riferimento erogata | 2,5Vdc |
| Corrente massima erogata dal riferimento | 10mA |
| Resistenza d'ingresso | 10MΩ |
| Max. errore di linearità | + 0,1% Vfs |
| Max. errore di offset | + 0,1% Vfs |
| S.n. | 71 dB |
| Tempo di conversione | Dipende dalla configurazione dell'ingresso analogico. Vedi paragrafo Tempi di conversione se presente 1) |
| Isolamento | 1000 Vrms |

4.10.3.3 Ingresso analogico in configurazione volmetrica
| Tipo di collegamento | Voltmetrico 0÷10V |
| Risoluzione | 12bit |
| Resistenza d'ingresso (Rin) | 40KΩ |
| Valore di danneggiamento | 20V |
| Max. errore di linearità | + 0,1% Vfs |
| Max. errore di offset | + 0,1% Vfs |
| S.n. | 71 dB |
| Tempo di conversione | Dipende dalla configurazione dell'ingresso analogico. Vedi paragrafo Tempi di conversione se presente 1) |
| Isolamento | 1000 Vrms |

4.10.4 Esempi di collegamento
4.10.4.1 Ingressi analogici generici su CN14
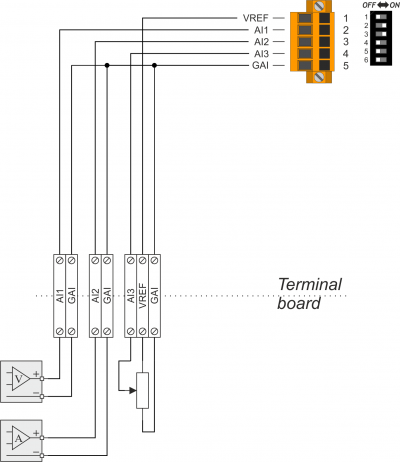
- AI1 voltmetrico
- AI2 amperometrico
- AI3 potenziometrico
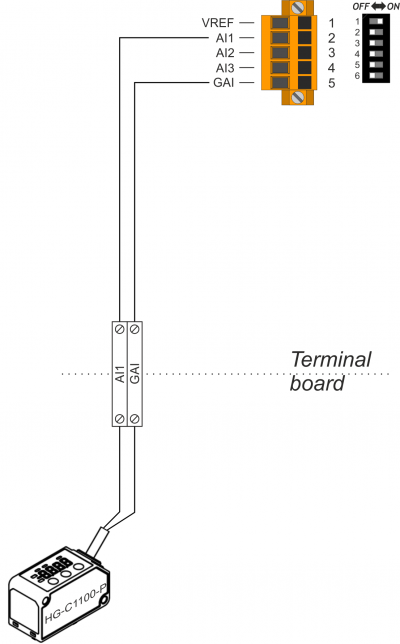
4.10.4.2 Sonda scansione laser HG-C1100-P su CN14
Se presente l'espansione ingressi analogici è possibile collegare un Micro Laser Distance Sensor HG-C1100-P della Panasonic all'ingresso AI1.
Tramite il sensore laser saranno possibili le seguenti operazioni:
- Scansione di superficie per modello 3D (creazione file STL del modello e file TXT con nuvola dati acquisiti).
- Scansione per mappatura della planarità superficie (creazione file STL della superficie e file TXT con nuvola dati acquisiti).
Per funzionare correttamente il sensore va resettato ai valori di fabbrica e l'ingresso analogico AI1 va posto in configurazione amperometrica 0-20mA.
Per maggiori dettagli sui collegamenti e la configurazione del sensore Laser fare riferimento all'application note: AN003 - Sensore Laser Panasonic HG-C Series
4.11 Uscite digitali
Le uscite digitali chiamate “Uscita utente” possono essere configurati dal software RosettaCNC per svolgere alcune funzioni. Per esempio: accensione mandrino con rot. oraria, accensione mandrino con rot. antioraria, attivazione aria, attivazione acqua, uscite aux 1..4, ecc
4.11.1 Uscite protette
4.11.1.1 Connettori
| CN7 | Morsetto | Simbolo | Descrizione |
|---|---|---|---|
 | 1 | V+ | Ingresso alimentazione uscite (12÷28V dc) |
| 2 | O1 | Uscita utente 1 | |
| 3 | O2 | Uscita utente 2 | |
| 4 | O3 | Uscita utente 3 | |
| 5 | O4 | Uscita utente 4 | |
| 6 | O5 | Uscita utente 5 | |
| 7 | O6 | Uscita utente 6 | |
| 8 | O7 | Uscita utente 7 | |
| 9 | O8 | Uscita utente 8 | |
| 10 | V- | Ingresso alimentazione uscite (0V dc) |
| CN4 | Morsetto | Simbolo | Descrizione |
|---|---|---|---|
| | 1 | V+ | Ingresso alimentazione uscite (12÷28V dc) |
| 2 | O9 | Uscita utente 9 | |
| 3 | O10 | Uscita utente 10 | |
| 4 | O11 | Uscita utente 11 | |
| 5 | O12 | Uscita utente 12 | |
| 6 | O13 | Uscita utente 13 | |
| 7 | O14 | Uscita utente 14 | |
| 8 | O15 | Uscita utente 15 | |
| 9 | O16 | Uscita utente 16 | |
| 10 | V- | Ingresso alimentazione uscite (0V dc) |
Connettore CN4 disponibile solamente con Codice di ordinazione campo Espansione I/O = 1 o 3.
4.11.1.2 Caratteristiche elettriche
| Tipo | PNP |
| Max. tensione di funzionamento | 28V |
| Caduta di tensione interna max. | 600mV |
| Corrente massima | 500mA |
| Tempo di massimo commutazione da ON a OFF | 270µs |
| Tempo di massimo commutazione da OFF a ON | 250µs |

4.11.1.3 Esempi di collegamento su CN7

4.11.2 Uscite STEP-DIREZIONE
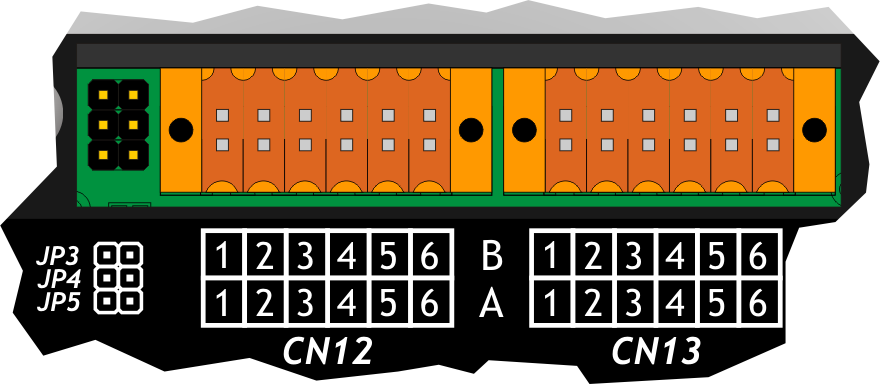
4.11.2.1 CN12
| Descrizione | Simbolo | Morsetto | CN12 | Morsetto | Simbolo | Descrizione | ||
|---|---|---|---|---|---|---|---|---|
| Alimentazione esterna uscite STEP/DIR | VDx | 1A |   | 1B | VDx | Alimentazione esterna uscite STEP/DIR | ||
| PNP/Line Driver | Uscita DIREZIONE X | DIR1+ | 2A | 2B | DIR1- | Uscita complementare DIREZIONE X | Uscite complementari per l'utilizzo nei drive con ingressi Line-Driver |
|
| Uscita STEP X | STEP1+ | 3A | 3B | STEP1- | Uscita complementare STEP X | |||
| Uscita DIREZIONE Y | DIR2+ | 4A | 4B | DIR2- | Uscita complementare DIREZIONE Y | |||
| Uscita STEP Y | STEP2+ | 5A | 5B | STEP2- | Uscita complementare STEP Y | |||
| Comune delle uscite stepper | 0V | 6A | 6B | 0V | Comune delle uscite stepper | |||
4.11.2.2 CN13
| Descrizione | Simbolo | Morsetto | CN13 | Morsetto | Simbolo | Descrizione | ||
|---|---|---|---|---|---|---|---|---|
| Alimentazione esterna uscite STEP/DIR | VDx | 1A | | 1B | VDx | Alimentazione esterna uscite STEP/DIR | ||
| PNP/Line Driver | Uscita DIREZIONE Z | DIR3+ | 2A | 2B | DIR3- | Uscita complementare DIREZIONE Z | Uscite complementari per l'utilizzo nei drive con ingressi Line-Driver |
|
| Uscita STEP Z | STEP3+ | 3A | 3B | STEP3- | Uscita complementare STEP Z | |||
| Uscita DIREZIONE A | DIR4+ | 4A | 4B | DIR4- | Uscita complementare DIREZIONE A | |||
| Uscita STEP A | STEP4+ | 5A | 5B | STEP4- | Uscita complementare STEP A | |||
| Comune delle uscite stepper | 0V | 6A | 6B | 0V | Comune delle uscite stepper | |||
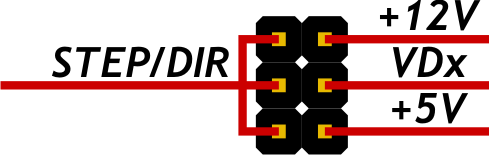
4.11.2.3 Settaggio tensione uscite STEP-DIREZIONE
Inserendo uno dei vari ponticelli JP3, JP4 o JP5, è possibile scegliere la tensione di funzionamento delle uscite STEP e DIR.
Deve essere inserito un solo ponticello alla volta
Se viene selezionata una delle due tensioni 5V(JP5) o 12V(JP3) ambedue i morsetti 1A e 1B devono rimanere scollegati
| Nome ponticello | Impostazione | Tensione nominale | |
|---|---|---|---|
 | JP3 | INSERITO | Seleziona la tensione dei segnali STEP/DIR a 12V |
| JP4 | INSERITO | I segnali STEP/DIR hanno una tensione pari al valore presente nei morsetti 1A o 1B. A questi morsetti deve essere fornita una alimentazione esterna. |
|
| JP5 | INSERITO | Seleziona la tensione dei segnali STEP/DIR a 5V |
.
 | JP3 |
| JP4 | |
| JP5 |
4.11.2.4 Caratteristiche elettriche
| Tipo di polarizzazione | PNP / Line-Driver |
| Massima frequenza d'uscita | fino a 2MHz (dipende dal codice di ordinazione) |
| Isolamento | 1000Vpp |
| Corrente max. di funzionamento | 20mA |
| Tensione VDx massima | 27Vdc |
Se si utilizzano driver per motori stepper, per una esperienza d'uso soddisfacente, che minimizzi vibrazioni e risonanze, si consiglia di impostare almeno 32 o 64 micropassi. Il valore opportuno va comunque sempre scelto considerando la frequenza massima impostata e le caratteristiche del driver.
Segnale step durante il cambio di direzione:

Il tempo di 25 microsecondi è configurabile nel software RosettaCNC.
Schema interno uscite comando motori stepper:

4.11.2.5 Esempi di collegamento
Assi X e Y PNP a 12Vdc su CN12

Il livello di tensione delle uscite è selezionato tramite il ponticello JP3
Assi X e Y PNP a 24Vdc su CN12

Il livello di tensione delle uscite, selezionando il ponticello JP4, è pari alla tensione fornita ai morsetti 1A o 1B
Assi A e Z Line-Driver a 5Vdc su CN13

Il livello di tensione delle uscite è selezionato tramite il ponticelli JP5
Assi A e Z Line-Driver a 24Vdc su CN13

Il livello di tensione delle uscite è selezionato tramite il ponticelli JP4
4.12 Uscite analogiche
4.12.1 Connettore
| CN3 | Morsetto | Simbolo | Descrizione |
|---|---|---|---|
 | 1 | GAO | Comune uscite analogiche |
| 2 | AO1 | Velocità mandrino | |
| 3 | AO2 | Non utilizzata | |
| 4 | GAO | Comune uscite analogiche |
4.12.2 Caratteristiche elettriche
| Tipo di collegamento | In modo comune |
| Isolamento | 1000Vrms |
| Range di tensione (minimo a vuoto) | 0÷10V |
| Max. variazione offset in funzione della temperatura | +/- 5mV |
| Risoluzione | 16bit |
| Corrente massima | 1mA |
| Variazione dell'uscita in funzione del carico | 100 µV/mA |
| Resistenza d'uscita | 249Ω |

4.12.3 Esempi di collegamento su CN3

5. Esempi di collegamento e configurazione
Qui di seguito verranno illustrati alcuni schemi elettrici utili come esempio per la progettazione del sistema di controllo completo (quadro elettrico).
5.1 Collegamento di un pantografo XYZ
Nel seguente esempio vediamo uno schema di collegamento di tre stepper drive. Gli switch di HOME vengono utilizzati anche come limite per la direzione di movimento nella quale viene effettuata la proceduta di homing. Per l'altra direzione si utilizzano tre switch NC in serie e collegati con l'ingresso LIM.

In questo caso l'impostazione corretta degli ingressi nel pannello di configurazione sarà:

5.2 Configurazione del comando mandrino
Per il comando del mandrino sono disponibili le seguenti uscite:
- Uscita digitale per il comando della rotazione oraria
- Uscita digitale per il comando della rotazione antioraria
- Uscita analogica per la variazione di velocità
La scelta delle uscite digitali da utilizzare per queste funzioni viene eseguita nel pannello “Uscite” in “Impostazioni scheda RosettaCNC” come si evidenzia nella figura:

Il codice M3 o M4 attiveranno le uscite, M5 le disattiveranno.
Se RosettaCNC Board controlla anche la velocità di rotazione del mandrino allora bisogna collegare l'uscita analogica 0÷10V all'ingresso analogico dell'azionamento.
Nel parametro velocità massima si deve impostare la velocità raggiunta dall'azionamento alla tensione massima di 10V.
Il parametro “Tempo di avvio” se impostato ritarda l'esecuzione del Gcode per permettere al mandrino di raggiungere la velocità impostata. Questo tempo è utilizzato anche nel caso di spegnimento mandrino.
RosettaCNC Board mette a disposizione anche due ingressi digitali che possono essere utilizzati per informare il controllore quando il mandrino ha raggiunto la velocità impostata oppure quando è fermo.
La figura seguente illustra dove impostare la velocità di riferimento a 10V, il tempo di avvio e la configurazione degli ingressi:


Se sono configurati gli ingressi allora il valore nel parametro tempo di avvio indica sempre il tempo minimo di attesa anche se il livello logico dell'ingresso non richiede una attesa.
5.3 Collegamento consolle di comando
Di seguito vengono illustrati quattro esempi:
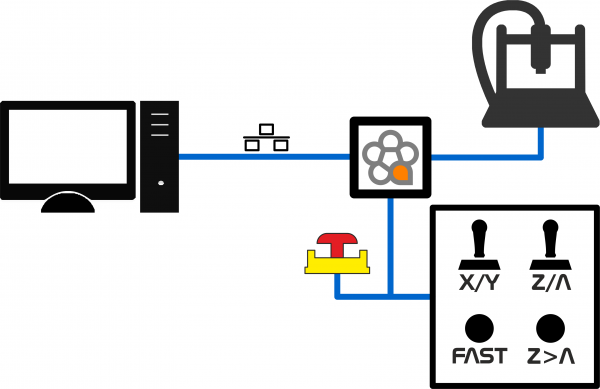
- Il modo più semplice è quello di operare sempre nel personal computer dove è installato il software RosettaCNC. Qui verranno comandati i Jogs, le sequenze di homing, avvio e arresto dei programmi Gcode, ecc. Di seguito una rappresentazione grafica della soluzione:
 .
.
Nel lato macchina sarà presente solo il pulsante di emergenza ESTOP (ed eventualmente il pulsante di ripristino). In aggiunta possono essere predisposti dei dispositivi MPG per il controllo dell'override (fino a due dispositivi). Il valore del parametro “Tipo di controller” in questo caso non è significativo. - Con la seguente soluzione vengono cablati vicino alla macchina i seguenti dispositivi di comando (oltre al pulsante di emergenza ESTOP): Joystick per il jog X-Y-Z. Un pulsante per la selezione delle velocità Jog Fast. Eventuale pulsante per modificare il comando del joystick Z in A. Di seguito una rappresentazione grafica della soluzione:
 .
.
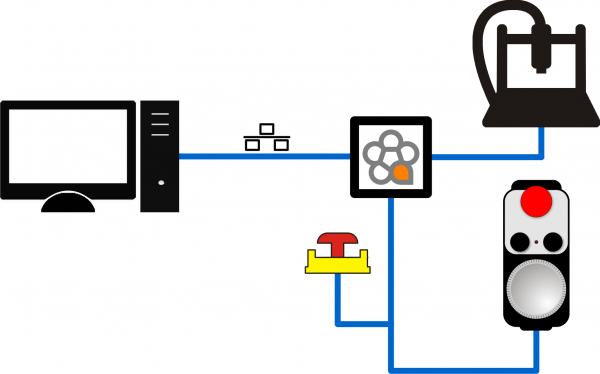
In aggiunta può essere predisposto un dispositivo MPG per il controllo dell'override (feed, rapidi, jog o spindle). Il valore del parametro “Tipo di controller” in questo caso deve essere impostato a “Doppio Joystick”. - Con la seguente soluzione viene installato vicino alla macchina un volantino per controllare i movimenti manuali. Durante il funzionamento, se impostato in configurazione, il volantino può essere utilizzato anche per il controllo dell'override (si configura il funzionamento del dispositivo MPG1). Infine sempre se impostato in configurazione il pulsante del volantino può essere utilizzato anche per eseguire un azzeramento dell'asse selezionato. Di seguito una rappresentazione grafica della soluzione:
 .
.
In aggiunta al volantino può essere predisposti, vicino ala macchina, un dispositivo MPG per il controllo dell'override (feed, rapidi, jog o spindle). Il valore del parametro “Tipo di controller” in questo caso deve essere impostato a “HandWheel A”. - Con la seguente soluzione vengono cablati vicino alla macchina i seguenti dispositivi di comando (oltre al pulsante di emergenza ESTOP): un Joystick per il jog+ e Jog-. Fino a 4 pulsanti per la selezione dell'asse. Un pulsante per eseguire l'azzeramento dell'asse. Di seguito una rappresentazione grafica della soluzione:
 .
.
In aggiunta può essere predisposto un dispositivo MPG per il controllo dell'override (feed, rapidi, jog o spindle). Il valore del parametro “Tipo di controller” in questo caso deve essere impostato a “Singolo Joystick”.




6. Diagnostica
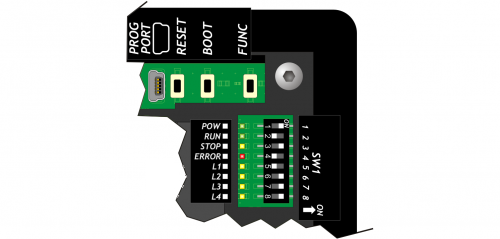
- Il Led POW di colore verde, segnala che il dispositivo è alimentato.
- Il Led RUN di colore verde, segnala che il dispositivo sta funzionando.
- Il Led STOP di colore giallo, segnala che il dispositivo è in stato di stop.
- Se il led ERROR di colore rosso lampeggia, il controllore è in stato di errore. Provare a spegnere e riaccendere, se il problema persiste il prodotto dovrà essere inviato all'assistenza tecnica attraverso il canale di acquisto utilizzato.
7. Ingressi Uscite Virtuali
Il firmware implementa una serie di ingressi e uscite utente virtuali che possono essere utilizzate con la comunicazione Modbus®.
Di seguito viene riportato l'elenco degli ingressi utente virtuali e la loro relazione con la numerazione ingressi virtuali in Modbus®.
| Numero ingresso utente | Numero ingresso virtuale |
|---|---|
| 33 | 01 |
| 34 | 02 |
| 35 | 03 |
| 36 | 04 |
| 37 | 05 |
| 38 | 06 |
| 39 | 07 |
| 40 | 08 |
| 41 | 09 |
| 42 | 10 |
| 43 | 11 |
| 44 | 12 |
| 45 | 13 |
| 46 | 14 |
| 47 | 15 |
| 48 | 16 |
Di seguito viene riportato l'elenco delle uscite utente virtuali e la loro relazione con la numerazione uscite virtuali in Modbus®.
| Numero uscita utente | Numero uscita virtuale |
|---|---|
| 17 | 01 |
| 18 | 02 |
| 19 | 03 |
| 20 | 04 |
| 21 | 05 |
| 22 | 06 |
| 23 | 07 |
| 24 | 08 |
8. Ingressi Index
A partire dal firmware 1.52 è possibile utilizzare i seguenti ingressi utente come ingressi index durante l'homing.
| Numero ingresso utente | Connettore |
|---|---|
| 32 | CN9 |
| 22 | CN10 |
9. Accessorio IQ023
A partire dalla versione software 1.9.4 è possibile collegare al PC di controllo l'accessorio IQ023.
L'utilizzo di questo accessorio deve essere abilitato nelle impostazioni scheda.
Le risorse dell'accessorio vengono così mappate:
| Risorsa IQ023 | Risorsa scheda RosettaCNC |
|---|---|
| D01 | Ingresso utente 49 |
| D02 | Ingresso utente 50 |
| D03 | Ingresso utente 51 |
| D04 | Ingresso utente 52 |
| D05 | Ingresso utente 53 |
| D06 | Ingresso utente 54 |
| D07 | Ingresso utente 55 |
| D08 | Ingresso utente 56 |
| D09 | Ingresso utente 57 |
| D10 | Ingresso utente 58 |
| D11 | Ingresso utente 59 |
| D12 | Ingresso utente 60 |
| D13 | Ingresso utente 61 |
| D14 | Ingresso utente 62 |
| D15 | Ingresso utente 63 |
| D16 | Ingresso utente 64 |
| D17 | Ingresso utente 65 |
| D18 | Ingresso utente 66 |
| D19 | Ingresso utente 67 |
| D20 | Ingresso utente 68 |
| D21 | Ingresso utente 69 |
| D22 | Ingresso utente 70 |
| D23 | Ingresso utente 71 |
| D24 | Ingresso utente 72 |
| E1A Fase A MPG 1 | Ingresso utente 73 |
| E1B Fase B MPG 1 | Ingresso utente 74 |
| E2A Fase A MPG 2 | Ingresso utente 75 |
| E2B Fase B MPG 2 | Ingresso utente 76 |
| E3A Fase A MPG 3 | Ingresso utente 77 |
| E3B Fase B MPG 3 | Ingresso utente 78 |
| E4A Fase A MPG 4 | Ingresso utente 79 |
| E4B Fase B MPG 4 | Ingresso utente 80 |
| A0 | Ingresso analogico 04 |
| A1 | Ingresso analogico 05 |
| A2 | Ingresso analogico 06 |
| A3 | Ingresso analogico 07 |
| A4 | Ingresso analogico 08 |
| A5 | Ingresso analogico 09 |
| A6 | Ingresso analogico 10 |
| A7 | Ingresso analogico 11 |
| MPG 1 | MPG 5 |
| MPG 2 | MPG 6 |
| MPG 3 | MPG 7 |
| MPG 4 | MPG 8 |
10. Versioni hardware precedenti
Di seguito sono riportati i link per consultare le versioni hardware precedenti del prodotto.
| Modello | Part number |
|---|---|
| Hardware version 01 | User Manual |
11. Contributi
Si ringraziano anticipatamente tutti coloro che vorranno contribuire al miglioramento di questa documentazione segnalando imprecisioni o contenuti. Scrivete all'indirizzo: support@rosettacnc.com